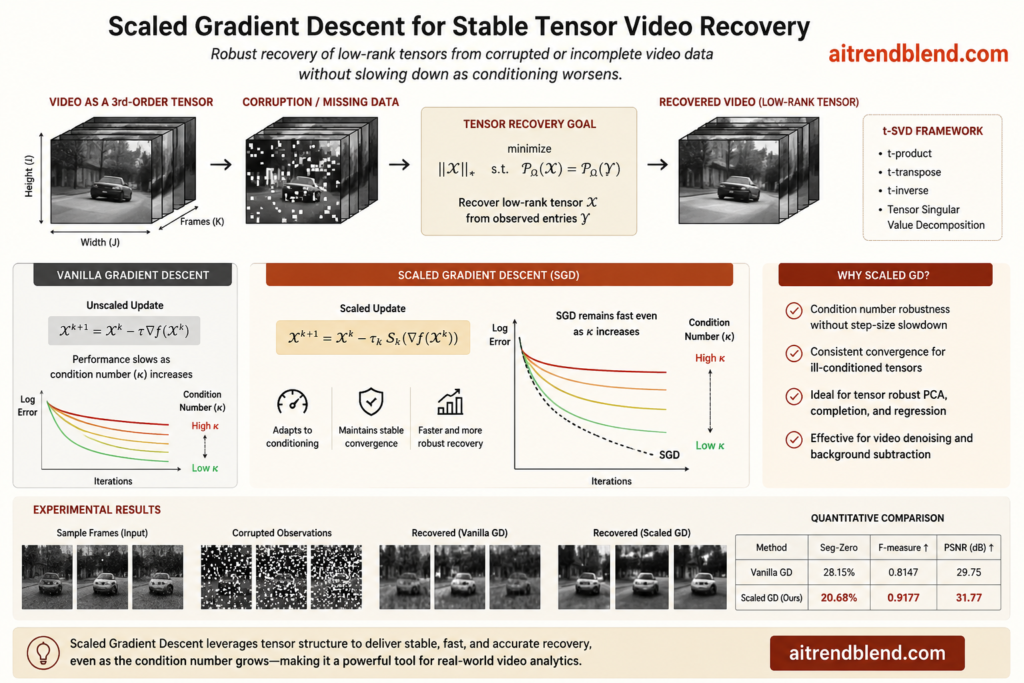
Scaled Gradient Descent for Stable Tensor Video Recovery
Computer vision. Nonconvex tensor optimization. Analysis by the aitrendblend editorial team. tensor robust PCA tensor completion tensor regression scaled gradient descent t-SVD video denoising background subtraction A stack of video frames viewed as a tensor, split into a stable background and a sparse foreground through low rank tensor recovery. Point a camera at a parking […]
Scaled Gradient Descent for Stable Tensor Video Recovery Read More »