When the Only Symmetry Is a Flip of Sign — Probing the Isometries of James-Schreier and Lorentz Spaces
Two Brazilian mathematicians have pinned down the exact symmetries of two classical families of infinite-dimensional spaces — finding that one is so rigid it only admits trivial isometries, while the other obeys a clean Banach-Stone law that forces proportional weight sequences whenever an isometry exists.
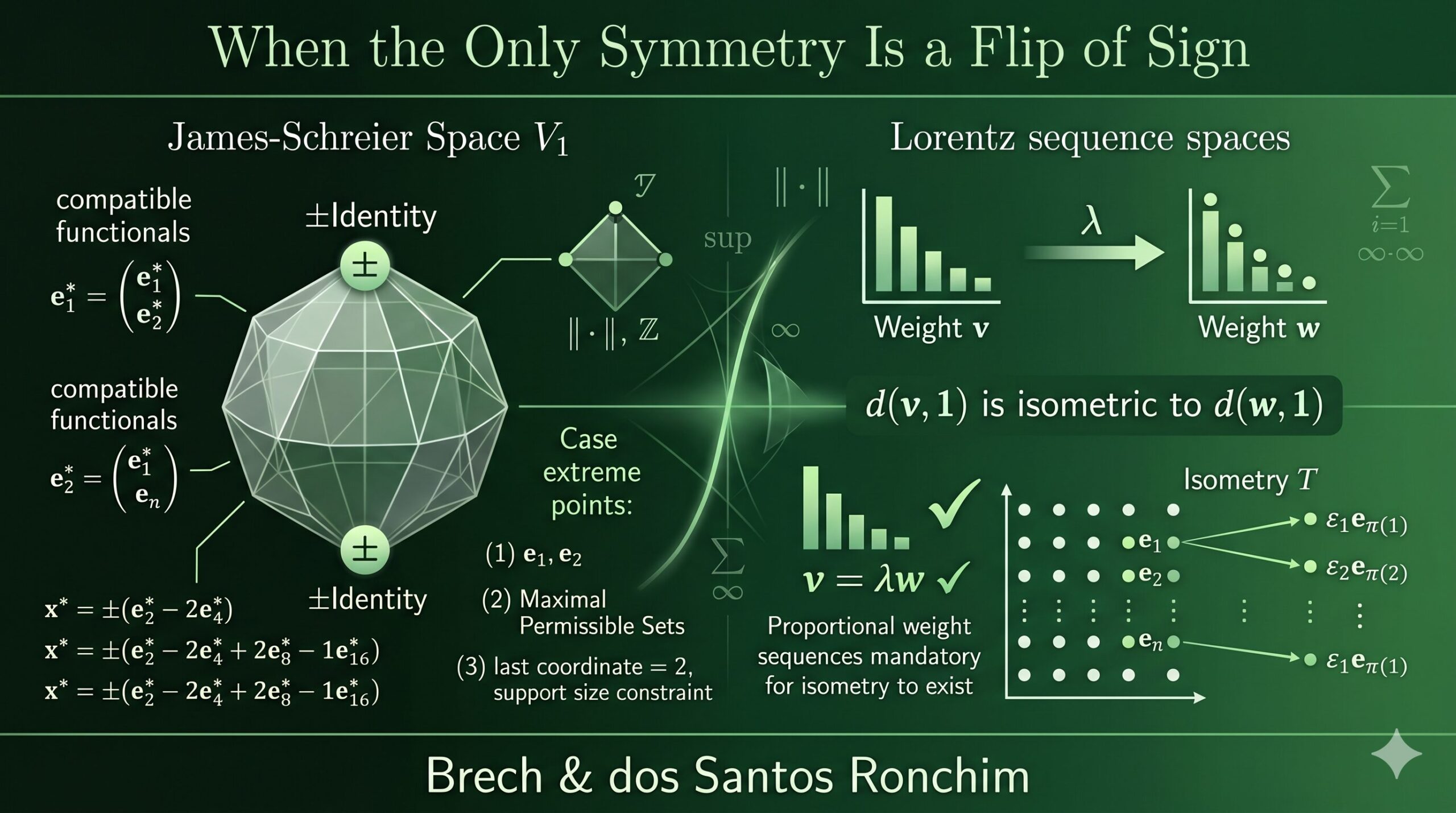
Imagine asking: what are all the distance-preserving maps on a given infinite-dimensional space? For simple spaces like \(\ell^p\), the answer has been known since Banach. But for more exotic spaces built by blending different combinatorial and analytic structures, the question is genuinely hard — and its answer can reveal surprising rigidity. A new paper by Christina Brech and Victor dos Santos Ronchim does exactly this for two classical but underexplored families: the James-Schreier space \(V_1\) and the Lorentz sequence spaces \(d(w,1)\). Their main finding: the symmetry of \(V_1\) is as small as it could possibly be, and the symmetry of \(d(w,1)\) is governed entirely by the weights that define it.
Why Isometries? A Geometric Window Into a Space’s Soul
In geometry, an isometry is a map that preserves distances exactly — no stretching, no compression. On the real line, the only isometries are reflections and translations. On a circle, they are rotations and reflections. On an infinite-dimensional Banach space, the story is richer and more varied, and the collection of all isometries — the isometry group — encodes deep information about the space’s geometric structure.
The study of isometry groups on Banach spaces goes back to Banach’s 1932 monograph, where he characterized the distance-preserving maps on classical spaces such as \(C[0,1]\) and the \(L^p\) spaces. Since then, mathematicians have pushed these results into increasingly exotic territories. The natural question in each new case is: does the isometry group have a clean algebraic description, or does it hide unexpected structure?
For sequence spaces — Banach spaces whose elements are infinite sequences of real numbers — the natural candidates for isometries are operators that permute coordinates and flip signs. More formally, an isometry \(T\) of a sequence space \(X\) is called diagonal if it takes the form \(T(x_n) = (\varepsilon_n x_n)\) for signs \(\varepsilon_n \in \{-1,1\}\), and standard if it takes the form \(T(x_n) = (\varepsilon_n x_{\pi(n)})\) for both signs and a permutation \(\pi\) of the natural numbers. A space with trivial isometry group is even more restricted: the only isometries are \(\pm\,\text{Id}\), meaning the identity and its negative. That is the strongest possible rigidity.
Think of the isometry group as measuring how “symmetric” a space is. A standard group allows all sign flips and all coordinate permutations — maximum flexibility. A diagonal group allows sign flips but no permutations. A trivial group allows neither — the only options are the identity and its negative. This paper proves that \(V_1\) has a trivial group, making it one of the most rigid naturally-normed spaces known.
The James-Schreier Space V₁ — A Hybrid With Surprising Stiffness
The James-Schreier spaces \(V_p\), for \(p \geq 1\), were introduced by Bird, Laustsen, and Zsák as a way to combine two famous constructions: the James space \(J_p\) and the Schreier space. The James space, introduced by Robert James in 1950, is celebrated as the first example of a quasi-reflexive Banach space — a space that sits inside its double dual with codimension exactly one. The Schreier space, on the other hand, is a sequence space defined by a combinatorial constraint on which finite sets of coordinates can be used to estimate norms.
The James-Schreier space \(V_1\) inherits features from both parents. Its norm is defined using the notion of permissible sets: a finite set \(A \subseteq \mathbb{N}\) is permissible if \(2 \leq |A| \leq \min A + 1\). For a sequence \(x = (x_n)\), the norm is
where the supremum is taken over all permissible sets \(A = \{n_1 < n_2 < \cdots < n_{k+1}\}\). This norm measures the "total variation" of the sequence along permissible sets, blending the oscillation-based flavor of the James space with the combinatorial restriction of the Schreier family. The resulting space \(V_1\) is a subspace of \(c_0\) — its sequences tend to zero — and its canonical basis \((e_n)\) is a Schauder basis that is shrinking but not unconditional.
The fact that the basis is shrinking is particularly important for the isometry analysis: it means the dual space \(V_1^*\) has the sequence \((e_n^*)\) as a Schauder basis, which allows a complete coordinate-by-coordinate description of dual elements. It is on this dual that the key structural analysis of the paper takes place.
The Key Tool — Extreme Points of the Dual Unit Ball
The strategy for characterizing isometries on a Banach space \(X\) runs through its dual. Any surjective isometry \(T: X \to X\) induces a dual isometry \(T^*: X^* \to X^*\), and \(T^*\) must map extreme points of the dual unit ball \(B_{X^*}\) to extreme points. So the first order of business is to fully describe what the extreme points of \(B_{V_1^*}\) look like.
The paper introduces the central notion of a compatible functional: a functional \(x^* \in B_{V_1^*}\) is compatible if its support is a subset of some permissible set and its nonzero coordinates alternate in sign, with the first coordinate having absolute value 1 and the interior coordinates having absolute value 2, subject to precise rules at the last coordinate. The set \(\mathcal{M}\) of all compatible functionals (together with the zero functional) turns out to be a norming set for \(V_1\) — every element of \(V_1\) achieves its norm against some compatible functional — and it is symmetric and weak*-closed.
By Milman’s theorem, the extreme points of \(B_{V_1^*}\) must lie inside \(\mathcal{M}\). The paper’s main theorem for this part identifies exactly which compatible functionals are extreme:
An element \(x^* \in B_{V_1^*}\) is an extreme point if and only if it is a compatible functional satisfying one of the following three conditions:
(1) \(x^* = \pm e_i^*\) for \(i \in \{1, 2\}\) — a unit coordinate functional at position 1 or 2;
(2) \(\text{supp}\, x^*\) is a maximal permissible set, meaning it is permissible and no proper extension remains permissible;
(3) The last nonzero coordinate of \(x^*\) has absolute value 2 and the support size satisfies \(n_1 – 1 \leq |\text{supp}\, x^*| \leq n_1\), where \(n_1 = \min \text{supp}\, x^*\).
This characterization is delicate. The proof of each direction uses carefully chosen test vectors in \(V_1\) — vectors like \(\chi_{[i,j]}/2\) (half the indicator of an interval), or specific signed combinations of basis vectors — whose norms can be computed exactly using the permissible-set structure. When a functional \(x^*\) is tested against these vectors, the resulting inequalities force the coordinates of any midpoint decomposition \(y^* + z^* = 2x^*\) to coincide with those of \(x^*\), one interval at a time.
Two particularly illuminating cases arise in the proof. For extreme points whose support is maximal permissible (Case 2 above), the argument proceeds in four nested claims, each pinning down one piece of the decomposition: the interior coordinates are forced first (by evaluating on half-interval vectors), then the first coordinate, then the coordinates before the support, then the last coordinate, and finally the coordinates after the support. Each claim uses a different trick tailored to that position.
For extreme points whose last coordinate has absolute value 2 (Case 3), a different approach is needed. Here the proof exploits vectors of the form \(y_{\vec{\theta}}\) — sums of \(\pm e_n\) over a finite set — whose norms can be bounded using the combinatorics of permissible sets. The bound is sharp enough to distinguish between coordinate values of 0 and \(\pm 1\), which is exactly the precision needed.
“Although \(V_1\) is built from James and Schreier structures, it exhibits isometric behavior markedly different from that of either of its components.” — Brech & dos Santos Ronchim · J. Math. Anal. Appl. 560 (2026)
The Main Rigidity Theorem — Why V₁ Has Only ±Identity as Isometries
With the extreme points of \(B_{V_1^*}\) fully characterized, the paper turns to describing \(\text{Isom}(V_1)\). The argument proceeds through the dual: any isometry of \(V_1\) induces a weak*-homeomorphic isometry of \(V_1^*\), and so it suffices to describe all such maps on the dual.
The proof proceeds in three claims, each progressively tightening the constraint on what an isometry can look like. First, any isometry \(S\) of \(V_1^*\) must send each basis functional \(e_n^*\) to a compatible functional — this follows because \(e_n^*\) lies in the weak* closure of the extreme points, and the set of compatible functionals is weak*-closed and contains all extreme points. Second, isometries must preserve the property of having maximal permissible support: if an extreme point has maximal support, its image must too.
The third and decisive step uses a technical lemma about how compatible functionals can interact. Specifically: if \(y^*\) is a compatible functional with \(|\text{supp}\, y^*| = n_1\) (the support size equals the minimum of the support) and \(z^*\) is another compatible functional such that their sum is an extreme point with maximal support, then \(z^*\) must be a single coordinate functional \(\pm e_l^*\) for some \(l\) beyond the support of \(y^*\). This lemma controls the “interaction zone” between the images of different basis functionals and is what ultimately forces \(S(e_1^*)\) to have support of size 1 — i.e., to be a single coordinate functional.
If \(S \in \text{Isom}(V_1^*)\) is a weak*-homeomorphism, then \(S = \pm\,\text{Id}\). As a consequence:
$$\text{Isom}(V_1) = \{\text{Id},\, -\text{Id}\}.$$
The James-Schreier space \(V_1\) has a trivial isometry group. The only distance-preserving maps from \(V_1\) to itself are the identity and the map \(x \mapsto -x\).
The proof of this theorem has two key novelties compared to earlier work on related spaces like the Schreier space. The Schreier space has a diagonal isometry group — sign changes are permitted but coordinate permutations are not. For \(V_1\), even sign changes beyond the global sign are forbidden. The reason lies in the alternating-sign structure of the extreme points: because elements of \(\text{ext}(B_{V_1^*})\) have strictly alternating coordinate signs, any permutation of the basis that is compatible with this alternation structure turns out to be trivial. The extra extreme points of the form \(e_1^* – e_l^*\) — with two-element maximal support — are what enforce this, by linking the image of \(e_1^*\) to the image of every other \(e_l^*\) and propagating the sign constraint globally.
Part Two — Lorentz Sequence Spaces and a Banach-Stone Theorem
The second half of the paper shifts focus to a completely different classical family: the Lorentz sequence spaces \(d(w,1)\). These spaces, introduced by Garling in 1968 and studied extensively since, are defined by a decreasing positive weight sequence \(w = (w_n)\). The norm on \(d(w,1)\) is
which is achieved by the decreasing rearrangement of \((|x_n|)\) — the sequence obtained by sorting the absolute values in decreasing order. The Lorentz spaces generalize the \(\ell^1\) space (obtained when all weights are equal) and have a rich symmetric structure: their canonical basis \((e_n)\) is a symmetric Schauder basis, meaning all coordinate permutations leave the norm invariant.
The question studied in this section is a Banach-Stone-type question: if \(d(v,1)\) and \(d(w,1)\) are isometric as Banach spaces, what must the weight sequences \(v\) and \(w\) have in common? The classical Banach-Stone theorem answers this for \(C(K)\) spaces: \(C(K)\) and \(C(L)\) are isometric if and only if \(K\) and \(L\) are homeomorphic. An analogous result for Lorentz function spaces \(L_{w,p}\) was proved by Carothers, Haydon, and Lin in 1993. The present paper establishes the discrete (sequence space) counterpart.
Two Lorentz sequence spaces \(d(v,1)\) and \(d(w,1)\) can look very different depending on their weight sequences. The Banach-Stone question asks: when can you map one isometrically onto the other? The answer turns out to be sharp and clean — only when the two weight sequences are proportional, meaning one is a constant multiple of the other.
The proof strategy uses the extreme points of the unit ball of \(d(w,1)\), which were characterized by Kamińska, Lee, and Lewicki. Under the assumption that \(w\) is strictly decreasing, the extreme points are precisely the vectors of the form \(\frac{1}{W(n_0)}\, \varepsilon\, \chi_A\), where \(|A| = n_0\), the signs \(\varepsilon \in \{-1,1\}^A\) are arbitrary, and \(W(n) = \sum_{i=1}^n w_i\) is the partial sum of weights. This clean description is the foundation for three lemmas that progressively pin down what any isometry between two Lorentz spaces must look like.
Lemma 5.2 — Support Overlap
If \(T\) is an isometry from \(d(v,1)\) to \(d(w,1)\), then for any two basis vectors \(e_r\) and \(e_s\), either \(T(e_r)\) and \(T(e_s)\) have the same support, or their supports are completely disjoint. No partial overlap is possible.
Lemma 5.3 — Support Size
Any isometry \(T\) maps all basis vectors \(e_r\) to images with the same support size. There is a single integer \(n\) such that \(|\text{supp}\, T(e_r)| = n\) for every \(r \in \mathbb{N}\).
Lemma 5.4 — Support Size Is One
Combining the previous two lemmas: supports must be disjoint, and therefore the common support size must be exactly 1. Every isometry maps basis vectors to scalar multiples of basis vectors.
Each lemma is proved by exploiting the extreme point structure of \(d(w,1)\). The key move in each case is to construct a combination of basis vectors whose image is forced to be an extreme point of the target unit ball — and then compare what the coordinates of that extreme point must look like from two different angles, obtaining a contradiction unless the supports behave as claimed.
Lemma 5.3 deserves special attention. Its proof computes the norms of vectors \(ae_r + be_s\) (with \(a > b > 0\)) in two ways — once using the ordering \(ae_r + be_s\) and once using \(ae_s + be_r\) — and equates the results. When the support sizes \(n_r\) and \(n_s\) are different, this leads to the factored identity
Since the weight sequence is strictly decreasing, both factors are nonzero when \(n_r \neq n_s\), yielding a contradiction. This algebraic identity is at the heart of why the weight structure is so constraining.
The Banach-Stone Theorem and Its Consequences
With the three lemmas in hand, the main theorem of the Lorentz section follows cleanly:
Let \(v\) and \(w\) be strictly decreasing weight sequences in \(c_0 \setminus \ell^1\). If the set of isometries from \(d(v,1)\) to \(d(w,1)\) is non-empty, then there exists a scalar \(\lambda > 0\) such that \(v = \lambda w\) — the weight sequences are proportional. Moreover, every isometry takes the form
$$T(e_n) = \lambda\, \varepsilon_n\, e_{\pi(n)},$$
for some permutation \(\pi\) of \(\mathbb{N}\) and signs \(\varepsilon_n \in \{-1,1\}\). In particular, \(\text{Isom}(d(w,1))\) is the standard group: all signed permutations of the canonical basis.
The scalar \(\lambda\) is determined explicitly: it equals \(v_1/w_1\), the ratio of the largest weights. The proof that \(v_n = \lambda w_n\) for all \(n\) proceeds by induction: knowing the proportionality up to \(n\), the norm of \(\sum_{i=1}^{n+1} e_i\) in \(d(v,1)\) can be compared to its image in \(d(w,1)\) to extract the next weight ratio.
The paper then extends this result to the predual spaces \(d^*(w,1)\). The predual of a Lorentz sequence space is the space of sequences \(x = (x_n)\) for which \(\frac{1}{W(n)}\sum_{i=1}^n \tilde{x}_i \to 0\), where \(\tilde{x}\) is the decreasing rearrangement of \((|x_n|)\). The authors prove a clean isometric identification between \(d^*(w,1)^*\) and \(d(w,1)\) using an explicit isometry \(\Phi_w(f) = (f(e_n))_{n\geq 1}\), and then transfer the rigidity result from the Lorentz spaces to their preduals via a commutative diagram involving the adjoint operator.
Let \(v\) and \(w\) be strictly decreasing weight sequences in \(c_0 \setminus \ell^1\). If \(\text{Isom}(d^*(v,1),\, d^*(w,1))\) is non-empty, then \(v = \lambda w\) for some \(\lambda > 0\), and every isometry takes the standard form. In particular, \(d^*(w,1)\) has the standard group of isometries.
Two Spaces, Two Lessons — What This Paper Adds to the Big Picture
Taken together, the two parts of this paper contribute two distinct lessons to the theory of isometries on sequence spaces. The first lesson, from the James-Schreier analysis, is that combining two spaces with moderate rigidity can produce a space with extreme rigidity. Both the James space and the Schreier space have non-trivial isometry groups; the James space has trivial isometries for \(p > 1\) but the Schreier space allows all sign flips. Yet their hybrid \(V_1\) allows nothing beyond \(\pm\,\text{Id}\). The alternating-sign structure of the extreme points, which comes from the James-space component of the norm, interacts with the combinatorial support constraints from the Schreier component to kill all remaining symmetry.
The second lesson, from the Lorentz analysis, is that the weight sequence is the complete invariant for isometric equivalence. Two Lorentz spaces look different — they have different norms, different unit balls, different geometric properties — unless their weights are proportional, in which case they are not just isomorphic but isometric via a simple rescaling and signed permutation. This is a strong structural result: it says that the weight sequence captures everything about the Lorentz space’s metric geometry, up to overall scale.
Both results fit into a broader program of understanding Banach-Stone phenomena for sequence spaces: given a class of Banach spaces parameterized by some data (a weight sequence, a combinatorial family, a convexity index), when does an isometry between two spaces in the class force an equivalence of their parameters? The present paper answers this completely for Lorentz sequence spaces and shows that the James-Schreier space is an outlier with no isometric copies of itself other than itself and its sign-reversal.
Looking ahead, the natural next questions concern higher-index James-Schreier spaces \(V_p\) for \(p > 1\), and more general families of spaces combining James and Schreier constructions with different combinatorial families. The tools developed here — particularly the detailed analysis of compatible functionals and their extreme-point status — should provide a useful blueprint for those investigations.
Read the Full Paper
Published in the Journal of Mathematical Analysis and Applications, Volume 560 (2026). The complete proofs, lemmas, and structural analysis are available via the journal’s website.
C. Brech, V. dos Santos Ronchim. Isometries of James-Schreier and Lorentz spaces. Journal of Mathematical Analysis and Applications, 560 (2026) 130537. https://doi.org/10.1016/j.jmaa.2026.130537
This article is an independent editorial analysis of a peer-reviewed open-access paper published under the CC BY 4.0 license. Mathematical statements paraphrase the original results; for complete proofs and precise formulations, consult the published paper. The paper was received August 20, 2025, and made available online February 19, 2026. The first author was supported by FAPESP grants (2016/25574-8 and 2023/12916-1); the second author was supported by CNPq (150193/2022-0).
References
- [1] L. Antunes, K. Beanland. Surjective isometries on Banach sequence spaces: a survey. Concr. Oper. 9 (2022) 19–40.
- [2] L. Antunes, K. Beanland, H.V. Chu. On the geometry of higher order Schreier spaces. Ill. J. Math. 65(1) (2021) 47–69.
- [3] S.A. Argyros, M. González. The extreme points of the unit ball of the James space J and its dual spaces. Stud. Math. 282(3) (2025) 257–287.
- [4] S. Banach. Théorie des opérations linéaires. Éditions Jacques Gabay, Sceaux, 1993 (reprint of the 1932 original).
- [5] S.F. Bellenot. Banach spaces with trivial isometries. Isr. J. Math. 56(1) (1986) 89–96.
- [6] S.F. Bellenot. Isometries of James space. In: Banach Space Theory, Contemp. Math. vol. 85, 1989, pp. 1–18.
- [7] A. Bird. An amalgamation of the Banach spaces associated with James and Schreier, part II. In: Banach Algebras 2009, Banach Center Publ. vol. 91, 2010, pp. 35–43.
- [8] A. Bird, N.J. Laustsen. An amalgamation of the Banach spaces associated with James and Schreier, part I. In: Banach Algebras 2009, Banach Center Publ. vol. 91, 2010, pp. 45–76.
- [9] A. Bird, N.J. Laustsen, A. Zsák. Some remarks on James-Schreier spaces. J. Math. Anal. Appl. 371(2) (2010) 609–613.
- [10] M.Š. Braverman, E.M. Semenov. Isometries of symmetric spaces. Dokl. Akad. Nauk SSSR 217 (1974) 257–259.
- [11] C. Brech, V. Ferenczi, A. Tcaciuc. Isometries of combinatorial Banach spaces. Proc. Am. Math. Soc. 148(11) (2020) 4845–4854.
- [12] C. Brech, C. Piña. Banach-Stone-like results for combinatorial Banach spaces. Ann. Pure Appl. Log. 172(8) (2021) 102989.
- [13] N.L. Carothers, R. Haydon, P. Lin. On the isometries of the Lorentz function spaces. Isr. J. Math. 84(1–2) (1993) 265–287.
- [14] M. Ciesielski, G. Lewicki. Sequence Lorentz spaces and their geometric structure. J. Geom. Anal. 29 (2019) 1929–1952.
- [15] M. Fakhoury. Isometries of p-convexified combinatorial Banach spaces. Stud. Math. 275(3) (2024) 197–234.
- [16] R.J. Fleming, J.E. Jamison. Isometries on Banach Spaces: Function Spaces. Chapman and Hall/CRC, Boca Raton, 2003.
- [17] D.J.H. Garling. On symmetric sequence spaces. Proc. Lond. Math. Soc. 3(1) (1966) 85–106.
- [18] A. Kaminska, H.J. Lee. M-ideal properties in Marcinkiewicz spaces. Comment. Math. (2004) 123–144.
- [19] A. Kamińska, H.J. Lee, G. Lewicki. Extreme and smooth points in Lorentz and Marcinkiewicz spaces. Rocky Mt. J. Math. 39(5) (2009) 1533–1572.
- [20] G. Koethe, O. Toeplitz. Lineare räume mit unendlich vielen koordinaten und ringe unendlicher matrizen. J. Reine Angew. Math. (1934).
- [21] J. Lindenstrauss, L. Tzafriri. Classical Banach Spaces. I: Sequence Spaces. Springer-Verlag, Berlin-New York, 1977.
- [22] R.E. Megginson. An Introduction to Banach Space Theory. Grad. Texts Math. vol. 183, Springer, New York, 1998.
- [23] W. Rudin. Functional Analysis, 2nd ed. McGraw-Hill, New York, 1991.
- [24] D. Tan. Some new properties and isometries on the unit spheres of generalized James spaces \(J_p\). J. Math. Anal. Appl. 393(2) (2012) 457–469.